

如果有一天你在公园跑步的时候,发现身边有一个机器人正在跟你一起跑步,千万不要太惊讶!这在未来很可能成为现实!今天我们就来“撩撩”世界上那些奔跑到根本停不下来的机器人吧!
闭眼跳桌飞奔狂魔MIT猎豹机器人:MIT新研发的第三代猎豹机器人,这货奔跑起来你连它的腿都看不清
这只“猎豹”不用依靠视觉和任何外部传感器,全凭控制算法,漂亮地纵身飞跃上桌,还能轻松爬上满是障碍物的楼梯,更不可思议的是它还能在突然被猛推或猛拉情况下迅速恢复平衡。这画面,是不是让你脑补了一场“速度与激情”。
“猎豹”纵身飞跃上桌
“猎豹”爬障碍物楼梯

“猎豹”被猛推或猛拉后迅速恢复平衡
看起来有没有一种很酷的感觉!有存在就有比较,MIT的猎豹机器人一直以来都被大众拿出来与波士顿动力的Cheetah机器人做比较,尽管这哥俩跑起来都是“腿”都看不清的货。
两豹相争必有一胜,MIT*新研发的第三代猎豹机器人拥有了接触检测算法(contact detection algorithm)和模型预测控制算法(model-predictive control algorithm)。那么,这两种算法究竟牛逼到哪里了呢?
接触检测算法帮助机器人确定在腿的摆动踩地之间转换的最佳时间点,这可为“豹子”的每只腿连续计算三种可能性,而这些令人脑袋炸裂的计算数据记录了豹子腿部相对于地面的角度和高度,以便于来维持豹子机器人本身的平衡。听起来吊炸天的无需视力的运动能力依靠一种模型预测控制算法,该算法可以预测出豹子某条腿在踏出一步后应该施加多大的力。

此算法的真正意义在于,确定“何时才是安全的落脚时间点”。猎豹机器人跟猎豹一样大吗?*新研发的第三代猎豹机器人(Cheetah3)仅有90磅左右的重量,体型大约像一只成年拉布拉多犬,四条腿子的它是不是听起来像犬不像豹!其实,猎豹机器人从*代开始便表现十分惊艳:它能自主跨越障碍物、实现每小时30英里(约 48 公里)的高速奔跑。(货真价实的成年健硕豹子时速110公里)

虽然猎豹机器人跑起来快到你看不清它的腿子,但这么快的机器人究竟有什么用?能做什么呢?第三代猎豹机器人应用场景将会十分丰富。如电厂检查,包括在楼梯、路障和地面上的障碍物情况下作业;在地震救援、洞穴探险等方面它*合适不过了。目前猎豹机器人已被添加了摄像头,以便为机器人提供周围环境的视觉反馈。
滑冰界“搬砖工”Handle
2017年,波士顿动力公司(Boston Dynamics)发布了Handle机器人。然而,从那以后,这款双轮机器人在该公司的机器人阵容中坐起了冷板凳。今年年初波士顿动力放出了Handle*新视频,视频中,两只Handle机器人靠两只轮子准确定位、灵活行走,并且靠前部吸盘吸住货物,熟悉完成托运工作。

Handle 跟波士顿动力旗下其他的机器人相比,*直接的不同在于采用双足下的“轮子”且新一代 Handle 可以轻松上下楼梯,还会跳跃,甚至是能走在有雪的斜坡上。
不过Handle中的很多控制都利用了波士顿动力对四足和双足机器人的经验。软件虽然不完全相同,但平衡和动态控制原理有很多共通点,并共享相同的物理基础。

强劲的跳跃能力有没有让你瞠目结舌
“上得厅堂下得厨房”,当然,搬东西也是它的强项~

*新Handle可以搬运13.6公斤的箱子,堆叠箱子的深度可达1.2米、高度可达1.6米。有木有很给力!

看到波士顿惊人的发展速度与卓越的成绩,有木有很激动很感动!奇葩双足机械鸵鸟——我只是个木有感情的跑步机当大多数人争相追赶波士顿动力时,有人却特立独行。“平面椭圆形运动器”——一听就是个奇葩货,大家俗称它为“机械鸵鸟”机器人。
“机械鸵鸟”是由美国佛罗里达人机认知研究院(Florida Institute for Human & Machine Cognition, IHMC)研发制造的,它能在不使用任何计算机辅助和传感器的情况下,进行稳定的奔跑,时速超16公里。
“鸟小影响大”。它的设计初衷是探寻机械设计如何能够完成机器人复杂的腿部运动。虽然这款小型机器人看上去行动有些笨拙,但却是腿足运动机器人领域的一次重要革新。
它的特殊之处并不仅是它名字,更重要的是机器人维持平衡的独到之处,IHMC的机器人可以利用自身的椭圆型设计达到平衡。这意味着它不需要其他机器人的重量和技术,仅靠单个马达就能跑起来,而其腿部的椭圆形运动轨迹和机器人主体的形状一起保持了机器人的内在平衡。
研究人员表示,这个机器人目前能够以每小时16公里的速度跑动。不过如果它按比例放大到人类大小,它就能提速至每小时32-48 公里。要问“机械鸵鸟”能够维持平衡的基点是什么?那就是它本名当中的两个字——“椭圆”。

IHMC机械鸵鸟机器人与波士顿动力的Atlas机器人的*大不同之处在于它对让人头疼的平衡算法说“NO”!“机械鸵鸟”不需要传感器和计算机辅助就能保持平衡,它依靠的是其本身设计的稳定性。

平面椭圆轮由单个马达驱动,能极大地降低电能消耗。运动时,机器人腿部进行物理学的椭圆运动,它能给机器人这样的身体形状提供固定性。

听起来很奇葩的“平面椭圆形运动器”——“机械鸵鸟”技术未来可能应用到各领域,例如太过危险、成本太高、距离太远的场景都可能用到,比如森林火灾、爆炸、核电站事故的现场处理等。有木有一种“鸟小用处大”的感觉。

猛禽机器人“RAPTOR:由韩国科学技术院(KAIST)开发出的名为Raptor(“猛禽”)的双足机器人,具有同时保持直立和弹跳的功能。论双足奔跑能力,Raptor在跑步机上*高速度可达48公里/时,打破了奥运选手博尔特创下的人类*快纪录44.7km/h。
Raptor已经具备初步的越障能力,但平衡性还欠完善,需悬挂在梁上以防翻倒。

目前较快的奔跑机器人是Boston Dynamics的WildCat,速度能够达到32千米每小时。但和Raptor相同,他们都只能在跑步机上运行,并且需要保护横杆防止机器人从跑步机上掉下去。
从速度上来看WildCat赢了,但该机器人是四足机器人,四足的稳定性能够让速度进一步的提升。Raptor是双足机器人,在这个基础上,它能够在速度上和WildCat相提并论是非常了不起的。
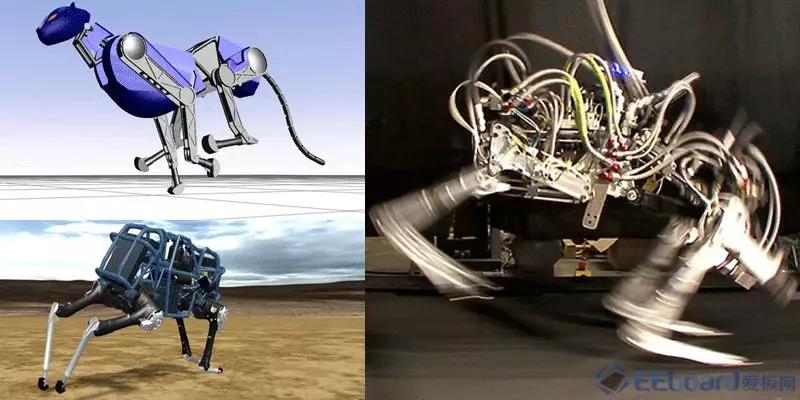
WildCat的腿部是通过液压驱动的,而且整个腿部没有任何关节,只是一个L型的金属支架。所以WildCat只能奔跑,不能跳跃。
WildCat的重量远大于Raptor,奔跑时必须靠四只脚的协调来保持平衡。到底谁是世界上跑得*快的机器人呢?你期待它们会在未来某一天与运动员一同出现在田径赛场上吗?